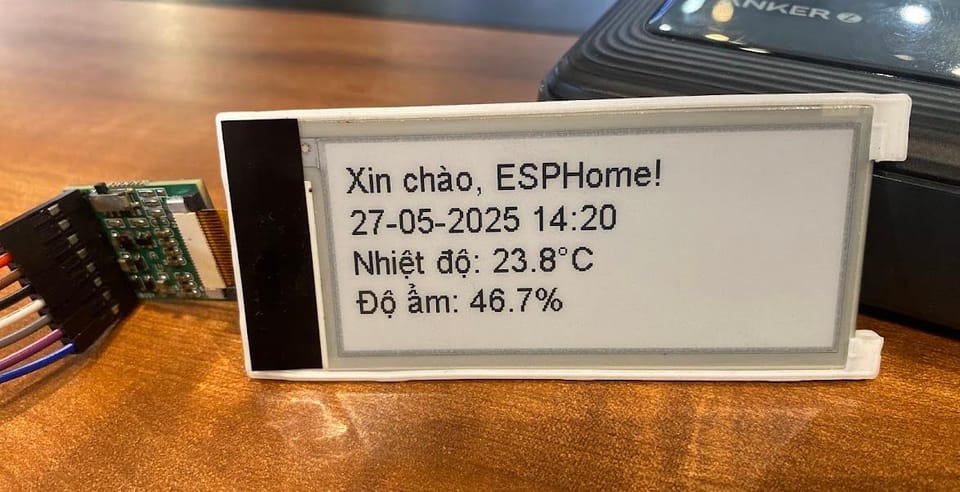
Tự Làm Dashboard E-paper Kết Hợp ESPHome Đơn Giản Mục đích: cho những bạn không chuyên code, thích vọc vạch show
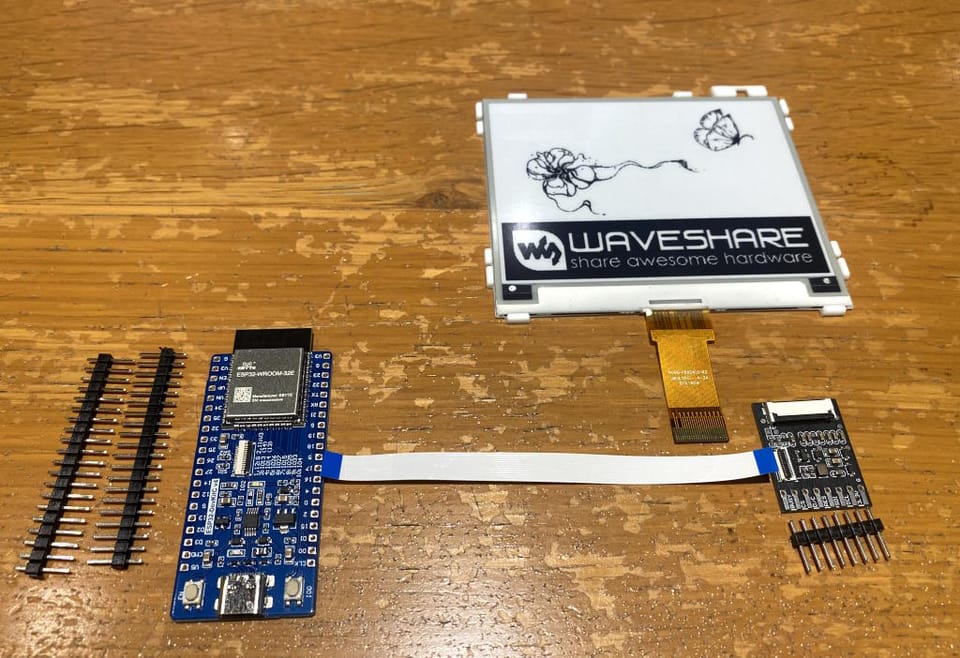
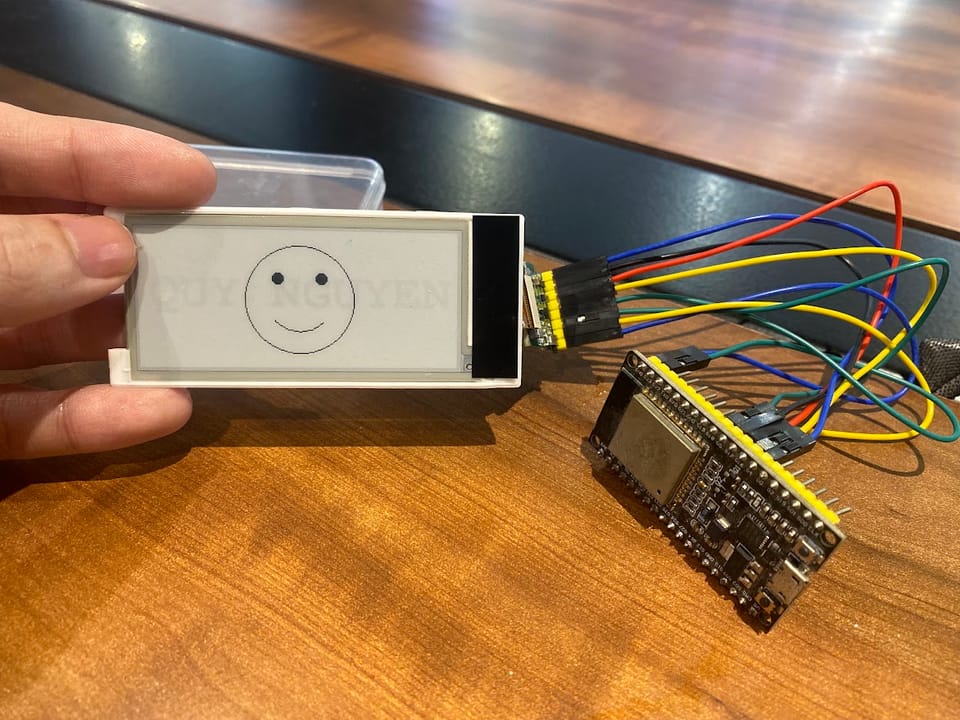
Hướng dẫn sử dụng E-Paper ESP32 Driver Board + màn E-ink Điểm danh các phần chính của KIT này như sau: Khi các
Cài đặt hệ điều hành cho Orange Pi Zero 3 cho newbie Dù là đơn giản nhưng việc cài đặt OS cho máy tính
Hướng dẫn kết nối tay cầm PS3 với ESP32 qua Bluetooth Trong bài viết này, chúng ta sẽ hướng dẫn cách kết nối
Hướng dẫn chi tiết về ROS Package và Workspace cho người mới TỔNG QUAN VỀ ROS PACKAGE VÀ WORKSPACE Trong ROS, phần mềm được
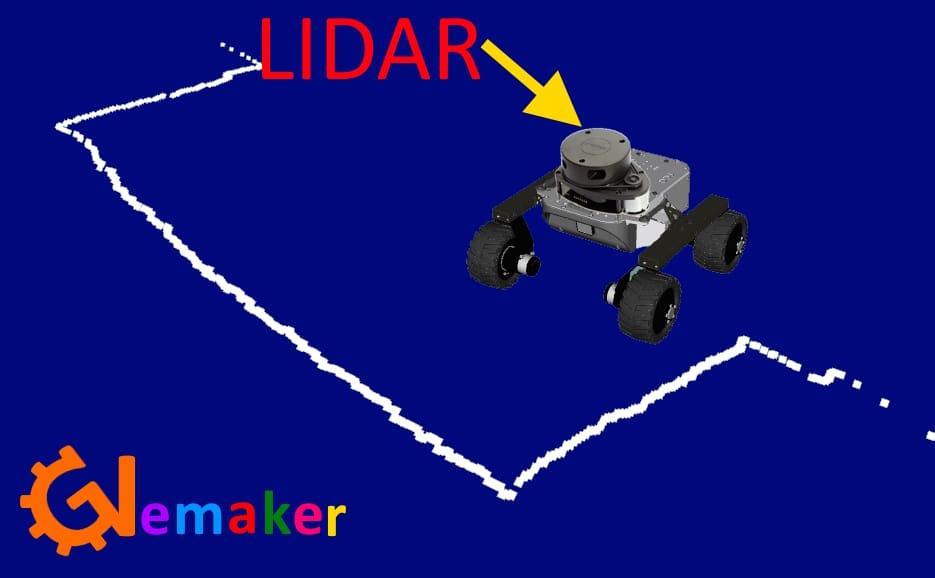
lidar a1m8 Hướng dẫn sử dụng cảm biến khoảng cách Lidar RPLIDAR 📋 Lưu ý * Tốc độ truyền (baud rate): * A1/A2: 115200 * A3/S1:
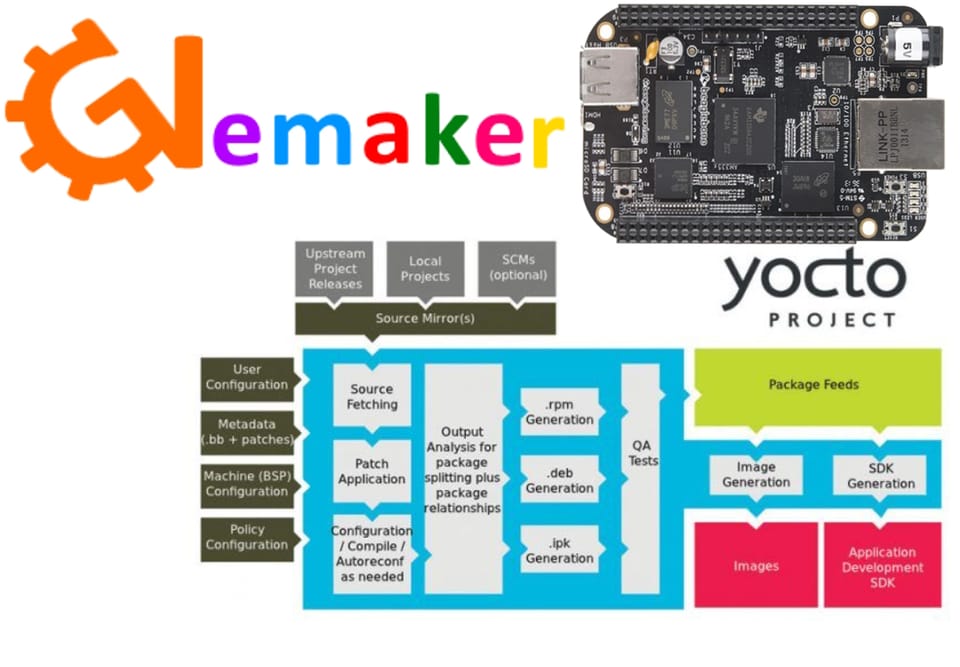
beaglebone black Hướng Dẫn Build Yocto với Kernel Real-Time cho BeagleBone Black Giới thiệu Hệ thống real-time (RT) đóng vai trò quan trọng trong
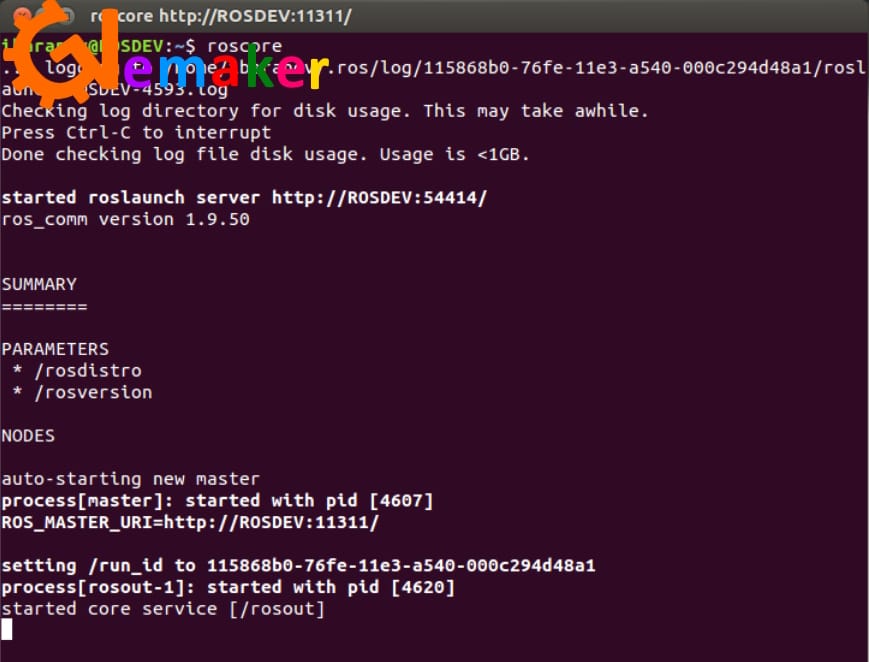
robot-operating-system Ros Commands Cheatsheet | Các lệnh trong ROS Hướng Dẫn Toàn Diện Lệnh ROS CLI: Cheat Sheet Chi Tiết ROS
Ubuntu install of ROS Noetic | Cài đặt ROS Noetic & thư viện cần thiết ROS Noetic Ninjemys là phiên bản mới nhất và cuối cùng của
robot-operating-system Ubuntu install of ROS Noetic | Cài đặt Hệ điều hành Ubuntu 20.04 Trong bài viết này, chúng ta sẽ cùng tìm hiểu cách cài
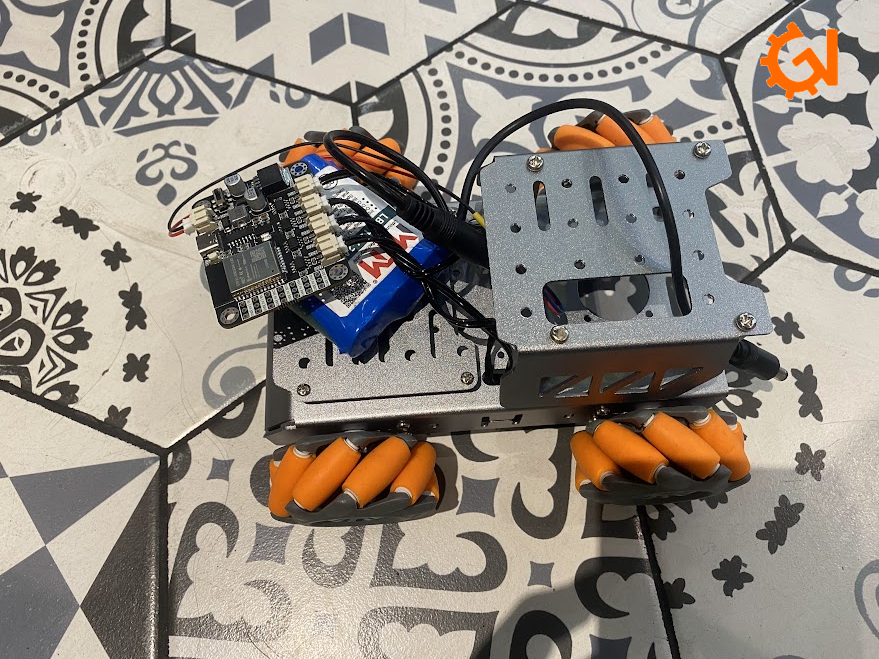
esp32 Điều khiển xe chế qua ESP32 bằng websocket Govapemaker xin hướng dẫn các bạn tạo ra 1 chiếc xe đồ