Hướng dẫn sử dụng cảm biến khoảng cách Lidar RPLIDAR
📋 Lưu ý
- Tốc độ truyền (baud rate):
- A1/A2: 115200
- A3/S1: 256000
- S2: 1000000
- Thông tin khác biệt giữa Lidar M1 , M2 và radar các dòng A1/A2/A3/S1/S2: Vui lòng kiểm tra thông tin theo từng dòng sản phẩm.
🧾 Nội dung bài viết
- Tổng quan
- Các thành phần của Lidar Silan
- Laser
- Bộ thu
- Đơn vị xử lý tín hiệu
- Cơ chế quay
- Nguyên lý hoạt động của Lidar đơn tuyến
- Phương pháp đo tam giác
- Phương pháp đo TOF
- So sánh thông số kỹ thuật của Lidar
- Ứng dụng của Lidar
- Chạy nút RPLIDAR
- Kiểm tra bằng RoboStudio
- Sử dụng công cụ frame_grabber
🟢 1. Tổng quan
LiDAR là gì?
LiDAR viết tắt từ cụm từ Light Detection and Ranging là một công nghệ viễn thám chủ động dựa trên cảm biến laser. Nguyên lý hoạt động cơ bản của LiDAR có thể hiểu đơn giản như sau: Phát một chùm tia laser tới một bề mặt và đo khoảng thời gian phản xạ lại của laser. Công nghệ này được sử dụng nhiều trong các ngành Hệ thống thông tin địa lý (GIS) để xây dựng một mô hình số độ cao (DEM) hoặc mô hình số địa hình (DTM) để lập bản đồ 3D.
Lidar thường chia thành hai loại chính:
- Đo tam giác (Triangular Ranging Method)
- Đo TOF (Time of Flight)
Lidar chủ yếu được sử dụng trong lĩnh vực robotics như định vị, dẫn đường tự động, và lập bản đồ không gian.
🟢 2. Các thành phần của Lidar SLAMTec
Lidar của SLAMTec bao gồm 4 thành phần chính:
🔹 2.1. Laser
- Là cơ chế phát laser trong lidar.
- Ví dụ: Lidar RPLIDAR A3 bật/tắt laser 16.000 lần mỗi giây.
🔹 2.2. Bộ thu
- Nhận ánh sáng phản xạ từ vật cản thông qua cụm thấu kính.
🔹 2.3. Đơn vị xử lý tín hiệu
- Kiểm soát phát laser và xử lý tín hiệu từ bộ thu.
- Tính toán khoảng cách đến đối tượng.
🔹 2.4. Cơ chế quay
- Quay các thành phần trên với tốc độ ổn định, thực hiện quét mặt phẳng và tạo thông tin bản đồ thời gian thực.

🟢 3. Nguyên lý hoạt động của Lidar đơn tuyến
Nguyên lý hoạt động của radar theo được minh họa trong hình dưới đây:
Lidar hoạt động dựa trên hai phương pháp chính:
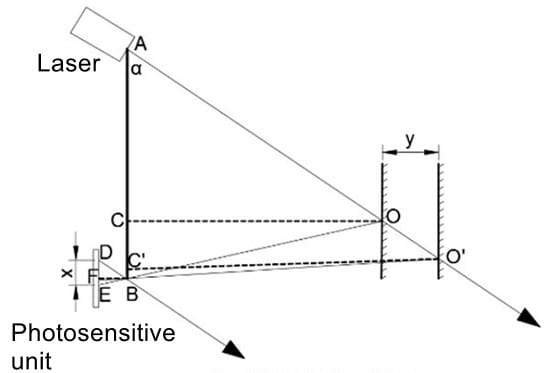
🔹 3.1. Phương pháp đo tam giác
- 3.1.1. Bắn trực diện: Laser phản xạ trực tiếp từ vật cản về bộ thu.
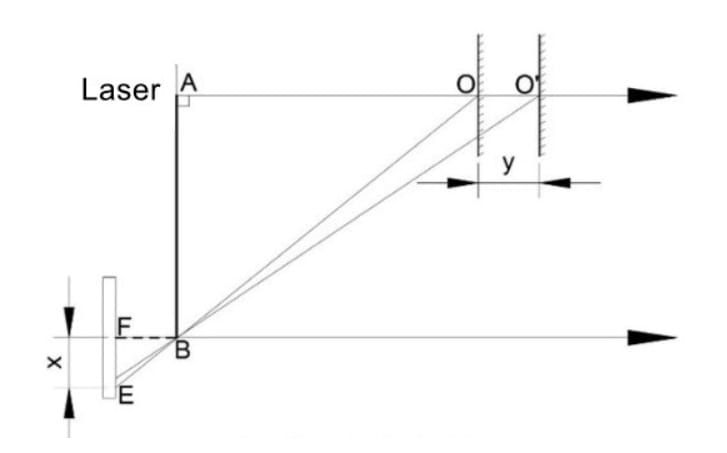
- 3.1.2. Bắn xiên: Laser phản xạ từ góc xiên.
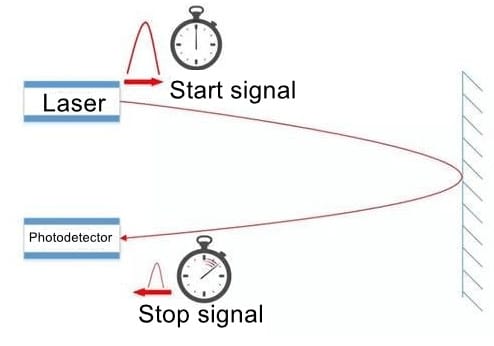
🔹 3.2. Phương pháp đo TOF
- Tính thời gian laser di chuyển từ nguồn phát, phản xạ lại và quay về bộ thu.
🟢 4. So sánh thông số kỹ thuật của Lidar
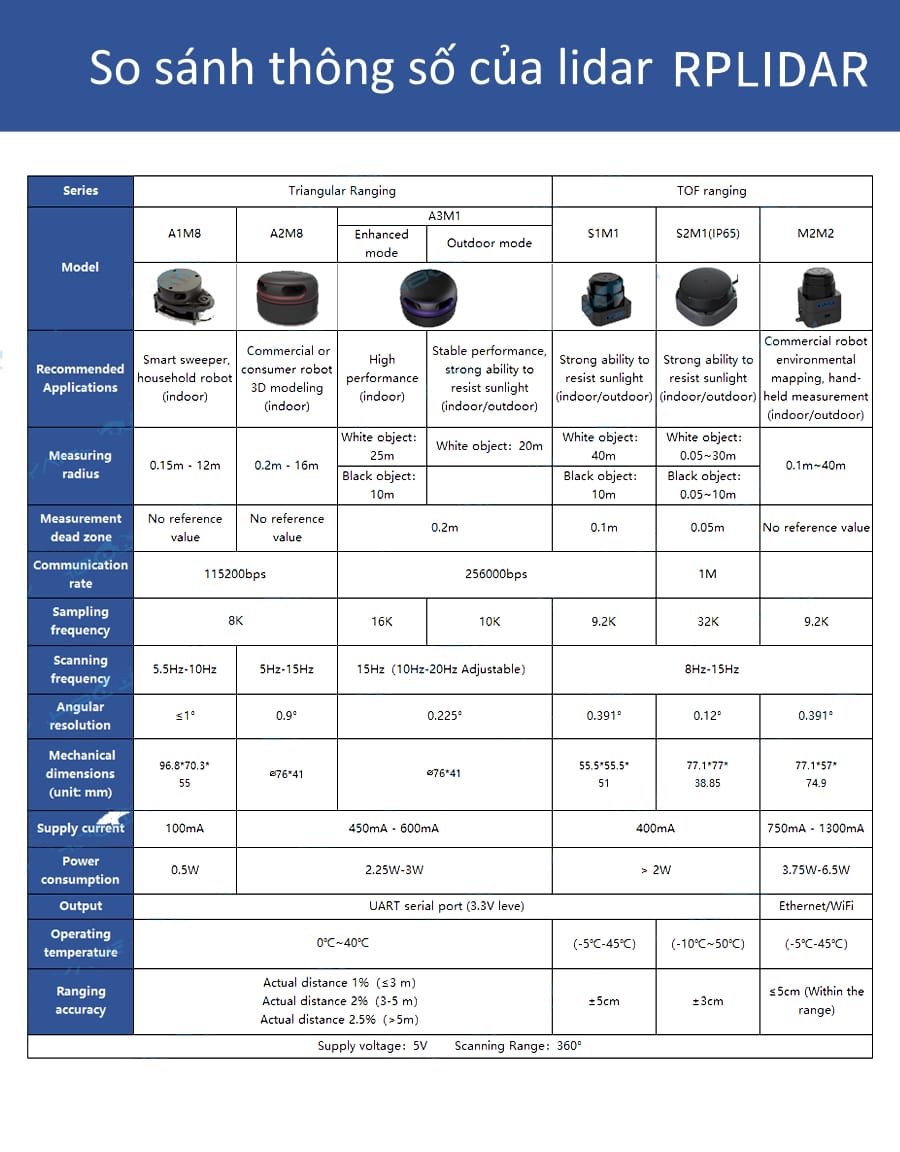
Các thông số quan trọng bao gồm:
| Thông số | Mô tả |
|---|---|
| Bán kính đo lường | Khoảng cách đo tối đa. |
| Tốc độ lấy mẫu | Số lần đo mỗi giây. |
| Tần số quét | Số lần quét trên giây. |
| Độ phân giải góc | Góc giữa hai lần đo liên tiếp. |
| Độ chính xác | Thay đổi khoảng cách nhỏ nhất có thể nhận ra. |
🟢 5. Ứng dụng của Lidar
Lidar đóng vai trò quan trọng trong các lĩnh vực như:
- Định vị và dẫn đường tự động cho robot.
- Lập bản đồ môi trường không gian.
- Ứng dụng bảo mật.
🟢 6. Chạy node RPLIDAR
🔹 6.1. Xây dựng gói ROS cho RPLIDAR
- Tải package này : rplidar_ros
- Clone package trên vào thư mục src của workspace.
- Chạy
catkin_makeđể build rplidarNode và rplidarNodeClient
Lưu ý: Nếu không cập nhật biến môi trường vào .bashrc, cần chạy lệnh:
source devel/setup.bash # Update environment variables
🔹 6.2. Remap USB serial port
- Cài đặt remap cổng USB:
./scripts/create_udev_rules.sh
- Sử dụng lệnh sau để xác định cổng USB:
./scripts/create_udev_rules.sh

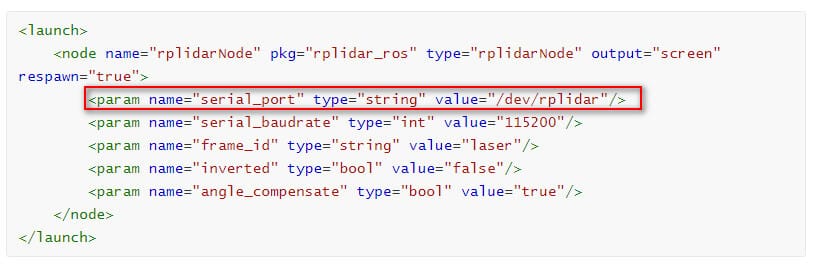
Cập nhật giá trị serial_port trong file khởi động.
🔹 6.3. Chạy package ROS RPLIDAR
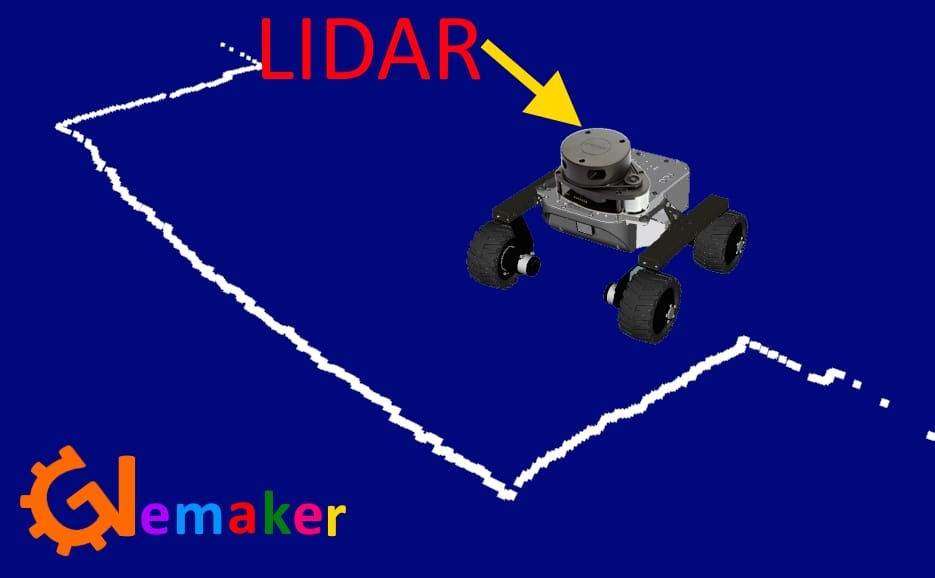
- Xem bằng RVIZ:
roslaunch rplidar_ros view_rplidar.launch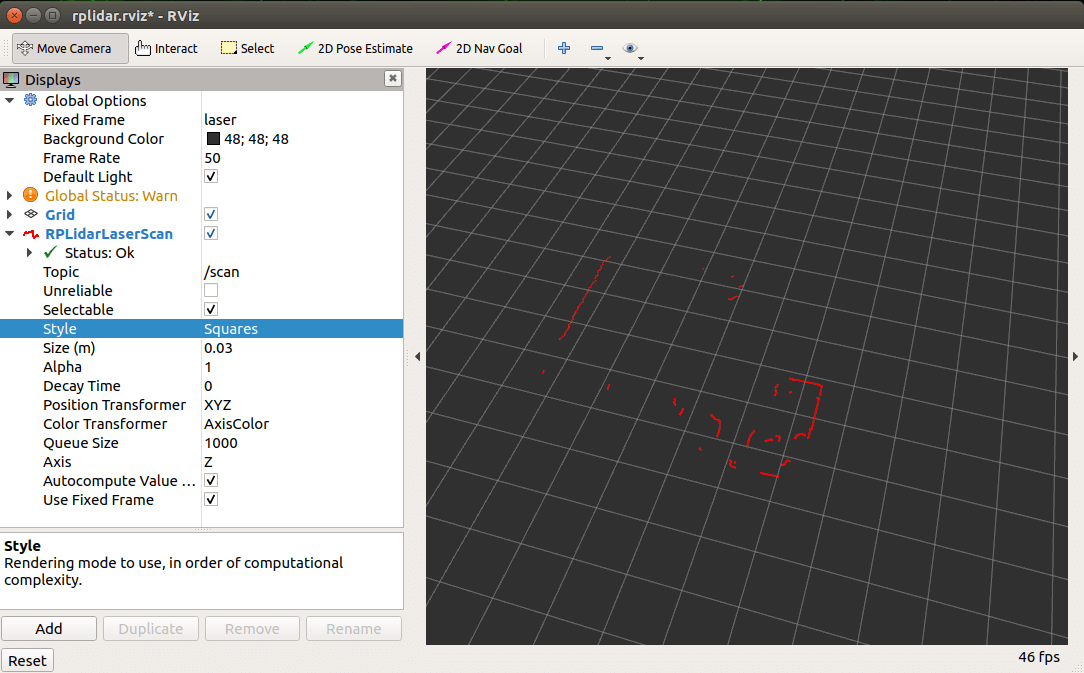
- Chạy rplidar node:
roslaunch rplidar_ros rplidar.launch # RPLIDAR A1/A2
roslaunch rplidar_ros rplidar_a3.launch # RPLIDAR A3
roslaunch rplidar_ros rplidar_s1.launch # RPLIDAR S1
roslaunch rplidar_ros rplidar_s2.launch # RPLIDAR S2- Kiểm tra bằng cách chạy lệnh sau
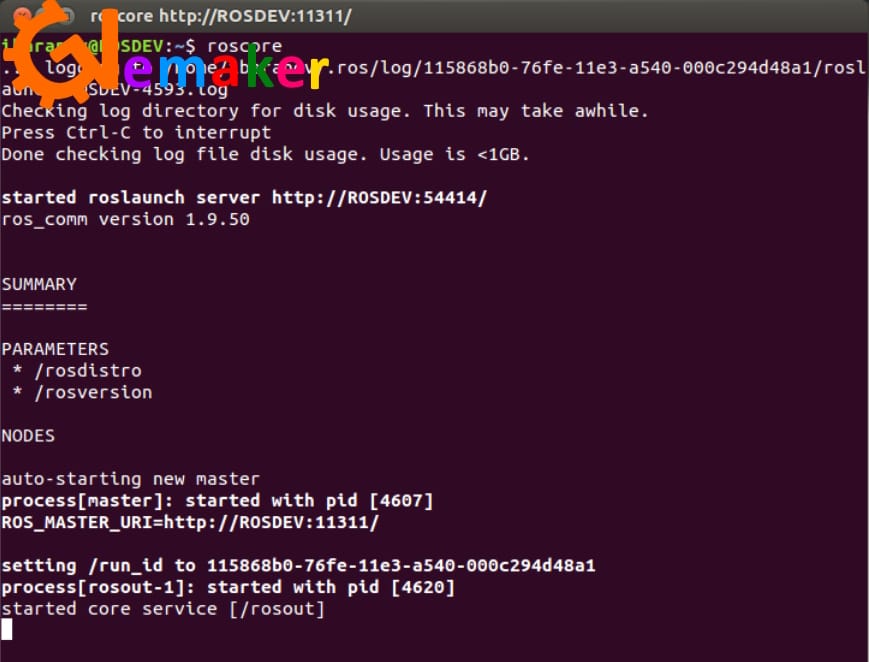
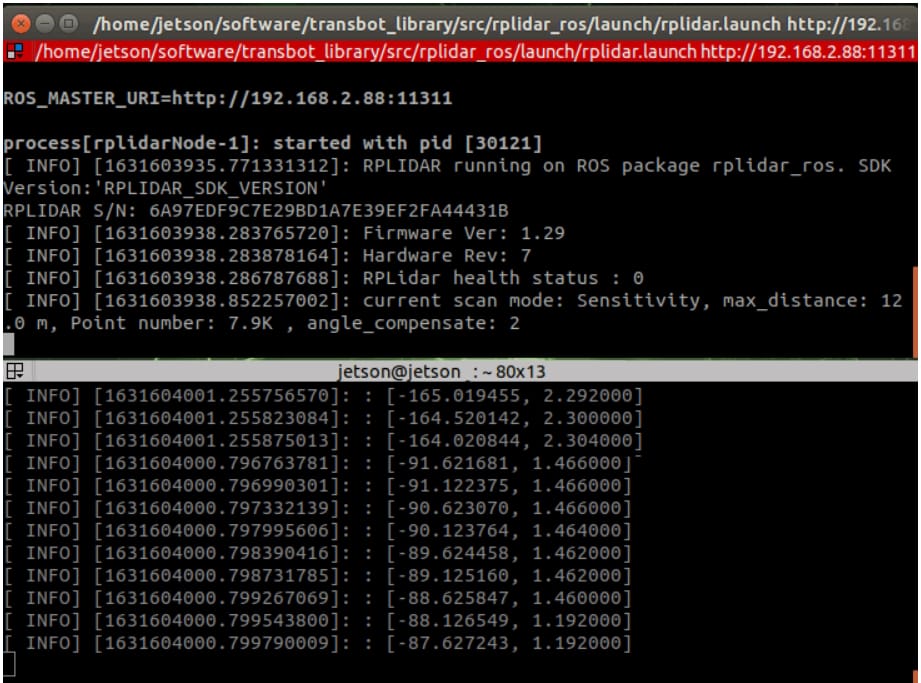
roslaunch rplidar_ros rplidar.launch
Nếu thành công sẽ được kết quả như hình:
🟢 7. Kiểm tra LIDAR bằng phần mềm hãng RoboStudio
🔹 7.1. Cài đặt RoboStudio
- Tải tại: RoboStudio.
- Điều chỉnh tốc độ baud rate tùy theo từng dòng lidar (VD: A1/A2: 115200, A3/S1: 256000, S2: 1000000).
🔹 7.2. Kiểm tra tên cổng com tương ứng khi kết nối lidar với PC LAPTOP
- Kiểm tra cổng (VD: COM2).
Nhấp vào nút Start (Bắt đầu) ở phía dưới bên trái Màn hình nền.
Nhấp chuột phải vào Computer (Máy tính)
Nhấp vào Properties (Thuộc tính).
Nhấp vào Device Manager (Trình quản lý thiết bị).

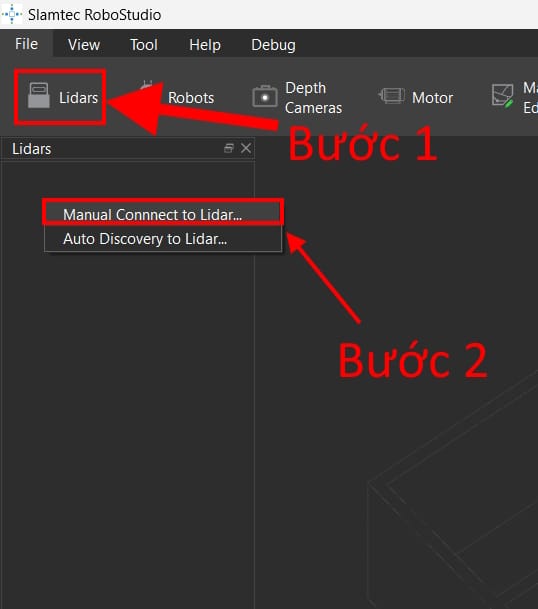
🔹 7.3. Khởi động phần mềm Slamtec robostudio
Chọn mục Lidars sau đó chọn Manual Connect to Lidar...
🔹 7.4. Kết nối
Chọn cổng và nhấn Connect.
🔹 7.5. Kiểm tra
- Vào giao diện kiểm tra, nhấn biểu tượng tam giác xanh để bắt đầu.

📧 Thông tin liên hệ trợ kỹ thuật từ hãng:
- Email: support@slamtec.com
- Wiki: rplidar wiki
- SDK: rplidar_sdk
- ROS: rplidar_ros
- Hướng dẫn: rplidar tutorial
- Website: Slamtec
Nếu bạn chưa có Lidar thực hành hãy liên hệ ngay:
Mọi thông tin liên hệ:
- Zalo: 0387521116
- Địa chỉ: 386/33 Quang Trung Phường 10, Gò Vấp, Thành Phố Hồ Chí Minh