Ros Commands Cheatsheet | Các lệnh trong ROS
Hướng Dẫn Toàn Diện Lệnh ROS CLI: Cheat Sheet Chi Tiết
ROS (Robot Operating System) là môi trường linh hoạt cho phát triển robot, với hệ sinh thái phong phú tối ưu hóa quy trình thiết kế, xây dựng và quản lý. Dưới đây là danh sách tổng hợp các lệnh ROS CLI cơ bản và nâng cao giúp bạn nhanh chóng làm quen và thành thạo các thao tác trong ROS.
Lệnh ROS Shell
roscd: Di chuyển tới thư mục đích của package.rosls: Liệt kê các thư mục và tệp tin trong package.rosed: Chỉnh sửa file package bằng phần mềm mặc định.roscp: Sao chép file của package.
Lệnh ROS Execution
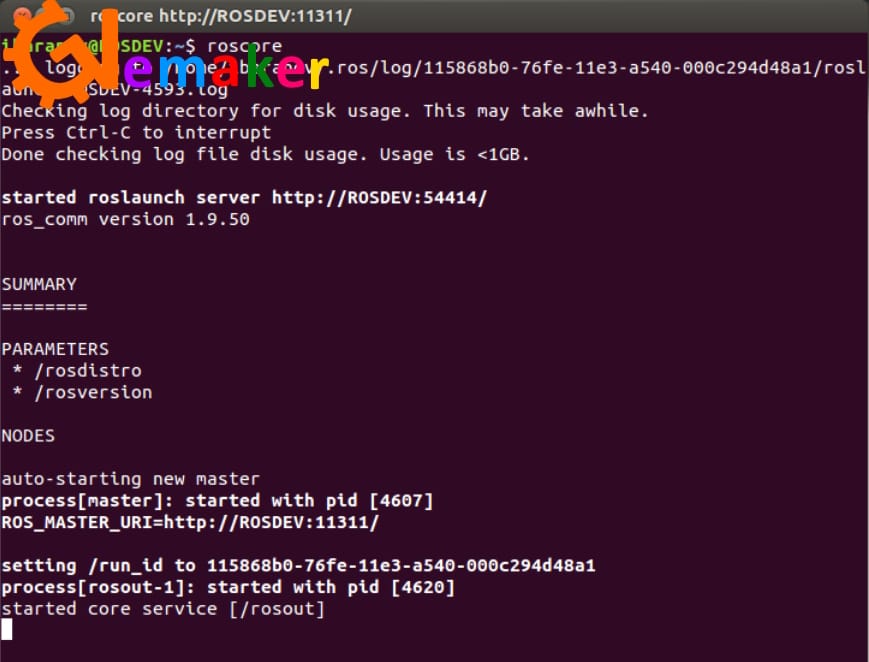
roscore: Khởi chạy master (server chính), tham số server và log file.rosrun [tên package] [tên node]: Chạy node của package.roslaunch [tên package] [tên file launch]: Chạy nhiều node bằng launch file.rosclean: Quản lý log file.
Lệnh Thông Tin ROS
rostopic - Quản lý topic
rostopic list: Liệt kê các topic.rostopic echo [tên topic]: Hiển thị message trong topic.rostopic find [kiểu message]: Tìm topic chứa kiểu message.rostopic type [tên topic]: Hiển kiểu message của topic.rostopic pub [topic] [message] [tham số]: Publish message đến topic.
rosnode - Quản lý node
rosnode list: Liệt kê các node.rosnode ping [tên node]: Kiểm tra kết nối với node.rosnode info [tên node]: Hiển thông tin node.rosnode kill [tên node]: Dừng node.rosnode cleanup: Xóa thông tin node lỗi.
rosservice - Quản lý service
rosservice list: Liệt kê các service.rosservice info [tên service]: Hiển thông tin service.rosservice args [tên service]: Hiển tham số service.rosservice call [tên service] [tham số]: Gọi request.
rosparam - Quản lý tham số
rosparam list: Liệt kê tham số.rosparam get [tên tham số]: Lấy giá trị tham số.rosparam set [tên tham số] [giá trị]: Gán giá trị.rosparam dump [file]: Lưu tham số vào file.rosparam load [file]: Tải tham số từ file.rosparam delete [tên tham số]: Xóa tham số.
Quản Lý Message và Service
rosmsg - Quản lý message
rosmsg list: Liệt kê các message.rosmsg show [tên message]: Hiển thông tin message.rosmsg package [tên package]: Liệt kê message trong package.
rossrv - Quản lý service
rossrv list: Liệt kê các service.rossrv show [tên service]: Hiển thông tin service.rossrv package [tên package]: Liệt kê service trong package.
rosbag - Quản Lý Log File
rosbag record [topic]: Lưu log message.rosbag info [file]: Hiển thông tin file log.rosbag play [file]: Phát dữ liệu log file.
Lệnh Catkin
catkin_create_pkg: Tạo package.catkin_make: Build package.catkin_init_workspace: Khởi tạo workspace.catkin_find [tên package]: Tìm package trong workspace.
Lệnh Package ROS
rospack: Quản lý package.rosinstall [tên package]: Cài đặt package.rosdep: Cài đặt thư viện package.rosmake: Build package.
Hashtags
#ROS #RobotOperatingSystem #ROSCLI #CheatSheet #Robotics #Automation #Catkin #ROSBag #ROSParam

Chúc bạn thành công!
Học ROS cùng GOVAPEMAKER SHOP nhé!
Mọi thông tin liên hệ:
- Facebook: https://www.facebook.com/System0nChip/
- Youtube: https://www.youtube.com/@GOVAPEMAKER
- Website mua hàng: http://govapemaker.com/
- Zalo: 0387521116
- Địa chỉ: 386/33 Quang Trung Phường 10 Gò Vấp, TP. Hồ Chí Minh